



日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 仿人智能的伺服控制
隨著自動控制技術向工業自動化各領域的深度滲透,基于精確數學模型的常規控制策略難以滿足各類系統對控制性能的要求,其中也包括伺服系統。文獻中討論了基于模糊邏輯、神經網絡的智能伺服控制策略,此外還簡略提及了其他形式的智能伺服控制策略。為了較深入地研究問題,有必要對常規PID控制算法作深入剖析,以便找出問題的關鍵所在;其次還應研究被控對象的特性,以便解決控制策略與控制對象特性匹配的問題。以下是對有關問題的簡要探討。
常規PID應用中存在的問題
常規PID控制算法
在計算機控制系統中,一般采用增量式控制算法,其優點是比較容易通過加權而獲得比較好的控制效果:
由于計算機輸出增量,所以誤動作時影響較小,必要時可用邏輯判斷的方法去掉;
手動/自動切換時沖擊小,便于實現無擾動切換。當計算機發生故障時,由于輸出通道或執行裝置具有信號的鎖存作用,故仍能保持原值;
算式中不需要累加。控制增量△u(k)的確定僅與最近幾次采樣有關;
增量式PID的控制算法為:
±△u(k)=KP[e(k)-e(k-1)>+KIe(k)+KD[e(k)-2 e(k-1)+e(k-2)
式中:T,采樣周期;k,采樣序號;u(k),采樣時刻k時的輸出值;e(k),采樣時刻k時的偏差值;e(k-1),采樣時刻k-1時的偏差值。由于一般計算機控制系統采用恒定的采樣周期T,一旦確定了KP、KI、KD的值,只要使用前3次測量值的偏差,即可求出控制增量。選擇了采樣周期后一般不再變動,對于PID參數,可離線地找到一組合適的參數KP、KI、KD使系統基本接近優化工作狀態。
PID控制器各參數對控制效果的影響
KP—比例調節
比例調節的特點是簡單、快速。缺點是對具有平衡性的控制對象有靜差(自平衡性是指系統階躍響應終值為一有限值);對帶有滯后的系統,可能產生振蕩,動態特性也差。比例系數KP增大可以加快響應速度,減小系統穩態誤差,提高控制精度。但是KP過大會產生較大超調,甚至導致系統不穩定;若KP取得過小,能使系統減少超調量,穩定裕度增大,但會降低系統的調節精度,使過渡過程時間延長。
KI-積分調節
積分調節可消除系統的靜態誤差,適用于有自平衡性的系統。加大積分系數KI (減小TI)有利于減小系統靜差,但過強的積分作用會使超調量加劇,甚至引起振蕩;減小積分系數KI雖然有利于系統穩定,避免振蕩,減小超調量,但又對系統消除靜態誤差不利。
KD-微分調節
微分調節作用主要是針對被控對象的慣性改善動態特性,它能給出響應過程提前制動的減速信號,有助于減小超調,克服振蕩,使系統趨于穩定;同時加快系統的響應速度,減小調整時間,從而改善系統的動態特性。KD的值對響應過程影響非常大。若增加微分作用KD,有利于加快系統響應,使超調量減小,增加穩定性,但也會帶來擾動敏感,抑制干擾能力減弱,若KD過大會使響應過程過分提前制動從而延長調節時間;反之,若KD過小,調節過程的減速就會滯后,超調量增加,系統響應變慢,穩定性變差。因此,對于時變且有不確定性的系統,KD不應取定值,應適應被控對象時間常數而隨機改變。
PID控制算法存在的問題
由上述分析可看出:嚴格意義上的最優PID是數學解,最優PID參數實際上也只是一種折衷,例如有的工況要求無超調,PID就無能為力;要求對對象建立嚴格的數學模型,這在很多情況下是難以實現的;PID參數一旦整定,再也沒有調控手段對參數及控制過程性能進行干預;對不確定性的復雜對象因難于數學建模用PID控制策略難以進行有效控制。
復雜被控對象特性與仿人智能控制技術
復雜被控對象特性
PID控制是難于對不確定性的復雜對象進行控制的,這類復雜對象的特性可以概括如下[3>[4>:系統參數的未知性、時變性、隨機性和分散性;系統時滯的未知性和時變性;系統嚴重的非線性;系統各變量間的關聯性;環境干擾的未知性、多樣性和隨機性。由于這類被控對象的特性難于用數學模型描述,用傳統的基于經典控制理論的PID控制和基于狀態空間描述的近代控制理論方法來實現對被控對象的高動、靜態品質的控制是非常困難的。因此一般都采用黑箱法,即輸入輸出描述法對其控制系統進行分析,大量引入人的智慧、經驗與技巧,控制器是基于數學模型和知識系統相結合的廣義模型設計的,也就是說對這類系統的控制一般采用智能控制策略,而傳統控制是無能為力的。
仿人智能控制的特點
用仿人智能控制(Human Simulated Intelligent Controller,HSIC)技術構成的系統有以下特點[2>:具有足夠的關于人的控制策略、被控對象及環境的有關知識以及運用這些知識的知識;是能以知識表示的非數學廣義模型和以數學表示的模型的混合過程,系統可采用開閉環控制和定性及定量控制相結合的多模態控制方式進行控制;HSIC具有變結構特點,能總體自尋優,具有自適應、自組織、自學習和自協調能力;具有補償和自修復能力、判斷決策能力和高度的可靠性。仿人智能控制認為,系統的輸出是控制作用與被控對象內部特征的綜合反映,HSIC能識別出系統輸出響應中的不穩定趨勢特征,做出在線的預估判斷,并以相應的控制策略消除這種不穩定趨勢,在線保證系統的穩定性。以上特點保證了HSIC在高精度伺服控制系統中的高動、靜性能要求。
仿人智能控制算法
仿人智能控制器的靜態特性
仿人智能控制的靜態特性如圖1所示,它在一定程度上模仿了人的智能控制特性。圖1畫出了仿人智能控制的工作過程的靜態特性。在分析中假定:e表示系統誤差,e*表示系統誤差的一階導數,U表示控制器的輸出。
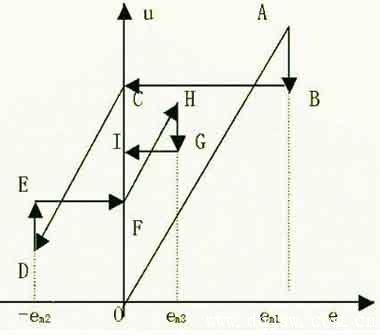
圖1 仿人智能控制的靜態特性
OA段—比例控制模式
當系統出現誤差且誤差趨勢增加時,即當e×e*>0時,仿人智能控制器產生一個比例輸出U=Kpe,其中,Kp為比例增益,它可大大超過傳統比例控制器所允許的數值。該模式運行在e=0至e=em1區間范圍,當e達到第一次誤差極值em1后,該模式立即結束,并進入AB抑制階段。
AB段—增益抑制控制模式
這是一個把原來過高比例增益KP乘上一個小于1的因子k,而使其增益降低的過程。因此,在B點處輸出已降到U01=kKpem1對應的值,抑制控制有助于改善系統品質與增加穩定裕度。
BC段—開環保持模式
進入該階段誤差從極值減小并只能向原點趨進,因此,保持過程BC段是一根平行于e軸的平行線。
CD段→DE段→EF段
第二個控制周期仍為三種模式的組合,但與前一周期的作用方向相反。CD段為反方向的比例控制。當e值越過U軸變為負值時,系統在反向比例閉環控制作用下,使誤差再次產生一個極值,即-em2。對于一個穩定控制系統,一般|em2|<|em1|。在第二個控制周期中k與K可以取與前一周期不同的值,從而增加仿人智能控制的靈活性。
FH段→HG段→GI段——第三個控制周期
該周期與第一周期方向完全相同,經過若干的周期,系統被控制在一個期望的穩定狀態。
仿人智能控制器的動態特性
動態特性如圖2所示,它分析了智能控制在時域內的智能控制特性。從動態特性可以看出:在oa段誤差滿足條件e×e*>0∪e=0∩e*≠0,采用比例控制,控制量隨誤差比例變化;在ab段誤差滿足條件e×e*<0∪e*=0,采用保持控制,控制量u保持誤差e極值累計和;在bc段誤差滿足條件e×e*>0∪e=0∩e*≠0,采用比例控制,控制量u隨誤差比例變化;在cd段誤差滿足條件e×e*<0∪e*=0,采用保持控制,控制量u保持誤差e極值累計和,且小于上次的保持值;在df段誤差滿足條件e×e*>0∪e=0∩e*≠0,采用比例控制,控制量u隨誤差比例變化;在fg段誤差滿足條件e×e*<0∪e*=0,采用保持控制,控制量u保持誤差e極值累計和,且大于上次的保持值。最后,控制的結果是誤差e收斂于零,控制u收斂于一個恒值。
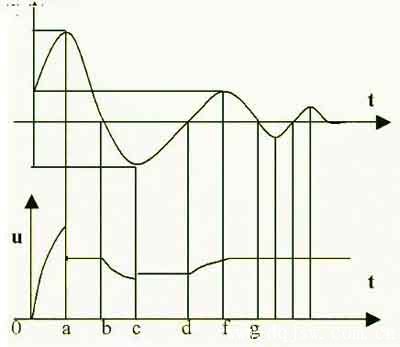
圖2 仿人智能控制的動態模型
從仿人智能控制的運行控制級原型算法及其特征可以看到控制器通過對誤差及其變化率的兩種簡單的關系特征識別并判斷系統處于不同的兩種運動狀態,分別采用兩種不同的控制模態。定量的控制操作輸出則是通過誤差峰值特征記憶和先驗知識,如比例系數K,抑制系數k與當前誤差大小的關系決定,這些都可以看成是對人動覺智能的簡單模仿。
從上述動靜態特性可知,仿人智能控制的運行機理是通過校正實現的:
動態校正,是一種在過渡過程中根據動態性能指標與系統的動態特性,對系統的運動趨勢進行動態預測,若有必要,不僅要校正當前的某個控制模態參數,而且還要臨時改變當前控制模態的策略,強迫校正控制器參數,使系統正常運行的校正方法。
靜態校正,是一種在過渡過程結束后根據綜合性能指標的評價前一個動態過程與靜態偏差、以及動態校正的有效性,統一權衡校正全部模態及修正特征空間劃分的控制器參數校正方法。
仿人智能控制器及其控制算法
仿人智能控制系統
由仿人智能控制器組成的控制系統如圖3所示。
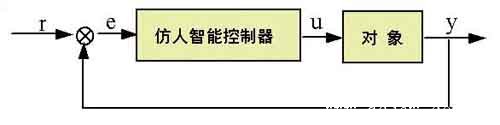
圖3 仿人智能控制器框圖
對于一些被控對象,雖然簡單的比例控制能保證其穩定,但常有較大的靜差,滿足不了穩態精度的要求。利用微機模仿人的操作,不斷地調整給定值,使系統輸出不斷逼近期望值,從而可以提高穩態精度,這就是仿人智能的基本原理。
仿人智能控制器的基本算法很接近人的思維過程:當系統誤差趨于增加或系統誤差保持常值時,仿人智能控制器采用比例控制模態,于是產生強烈的閉環控制作用,使誤差盡快停止增加;而在系統誤差向減小方向變化或為零時,仿人智能控制器采用保持控制模態,取消強控制作用,使控制量為一常值,對系統的動態過程進行等待和觀察,直到再次出現過調時,控制器又改用比例控制模態。
仿人智能控制器的基本算法
仿人智能控制的決策過程是以人對控制對象的觀察、記憶、決策等智能行為為基礎,把被調整量偏差及偏差變化率作為特征信息,進行模式選擇,從而決定控制器的輸出。其算法描述如下:
模式1:en×Δen>0或Δen=0,|en|>0,則un=un-1+k+×en;
模式2:en×Δen<0且|en|≥M, 則un=un-1+k-×en ;
模式3:en×Δen<0且|en|則un=un-1+k×em×n。其中,en為第n次誤差;Δen=en-en-1;K+為加速比例系數,K+>1; K-為抑制比例系數, 0
工程應用舉例
伺服系統是雷達系統的重要組成部分,它直接擔負著天線的驅動,使雷達能夠迅速而又準確地對準目標。整個伺服系統性能的好壞,直接影響到雷達系統的測量精度。傳統的雷達伺服系統采用PID 控制,其跟蹤位置回路用的是相位遲后—超前校正控制,因為相位遲后—超前校正通過零、極點的配置,能夠利用校正網絡中的超前部分改善系統的暫態響應性能,同時相位遲后部分又能很好地提高系統的穩態精度,因此在高精度測量雷達中得到了廣泛的應用,某雷達位置控制回路簡化原理框圖如圖4所示。
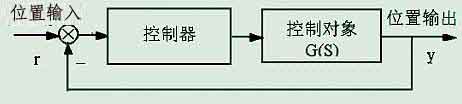
圖4 雷達位置回路簡化原理框圖
但是,控制系統中PID控制參數一般都是人工整定,經一次性整定得到的PID參數很難保證其控制效果始終處于最佳狀態。必須找到一種方法能夠隨時在線地調整參數,以改善系統動、靜態性能,確保系統始終具有很好的自適應性能。針對存在的問題,采用仿人智能控制策略,將原PID控制改為HSIC控制器,經初步試驗其響應如圖5曲線y1所示,y2是原PID控制器的響應曲線,顯然HSIC控制器明顯優于PID控制器。
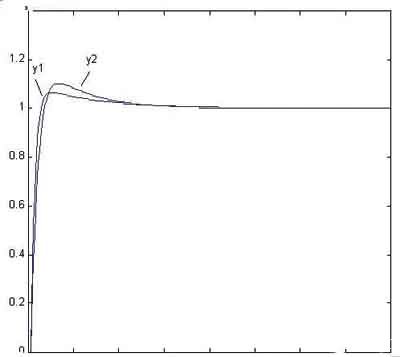
圖5 系統響應性能比較
結束語
文中主要討論了仿人智能控制策略及其原形控制算法,最后通過仿真及工程應用實例說明了該策略的可取之處。值得注意的是伺服控制系統的動、靜態性能指標好壞與控制策略選取緊密相關,應針對具體被控對象特性加以分析,根據滿足控制指標程度來決定控制策略與控制算法,而不是簡單地否定與肯定,更復雜的控制問題往往需要多種控制策略的融合。