



日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱L系列CPU模塊定位功能的作用及概述
日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱L系列CPU模塊定位功能的作用及概述
時間:2016-12-26 來源:未知 作者:admin 點擊:11116次
三菱L系列CPU模塊定位功能的概要(三菱CPU模塊定位功能)
定位是指,通過工作臺及機械將加工對象及工具等移動體(工件) 以指定的速度移動,正確地停止在目的位置處。
1、定位功能的作用
定位功能的控制是通過專用指令執行。
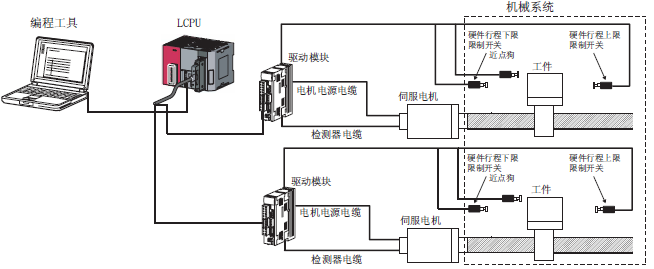
(1)、2軸控制
可以連接2個驅動模塊(2個電機),對2個坐標進行分別或同時控制。
(2)、原點回歸
有6種類型的原點回歸方式。使用近點狗(原點傳感器) 等,可以對原點(各控制的起點位置)及位置的“地
址”進行確立。(機械原點回歸)此外,可以在上限限制開關及下限限制開關的范圍內,自動進行原點回歸。
(原點回歸重試功能)
(3)、目的位置及速度
. 可以根據指定的地址或移動量,將工件移動至目標位置。(位置控制)
. 可以對工件進行移動直至執行停止指令為止。(速度控制)
. 可以將當前的位置更改為指定的數值。(當前值更改功能)
. 可以在工件的移動過程中對目標位置進行更改。(目標位置更改功能)
. 可以在工件的移動過程中對速度進行更改。(速度更改功能)
(4)、工件的移動范圍限制
可以在無需開關的狀況下將工件移動范圍的邏輯上限及下限設置在任意位置處。(軟件行程限制功能)
此外,也可設置使用了上限限制開關、下限限制開關的上限及下限范圍。(硬件行程限制功能)
(5)、JOG運行
可以在JOG 運行指令的執行過程中繼續進行脈沖輸出,將工件移動至任意的位置處。(JOG運行功能)
(6)、絕對位置檢測
使用帶絕對位置檢測器伺服電機,可以在停電后等情況下恢復當前位置。(絕對位置恢復功能)
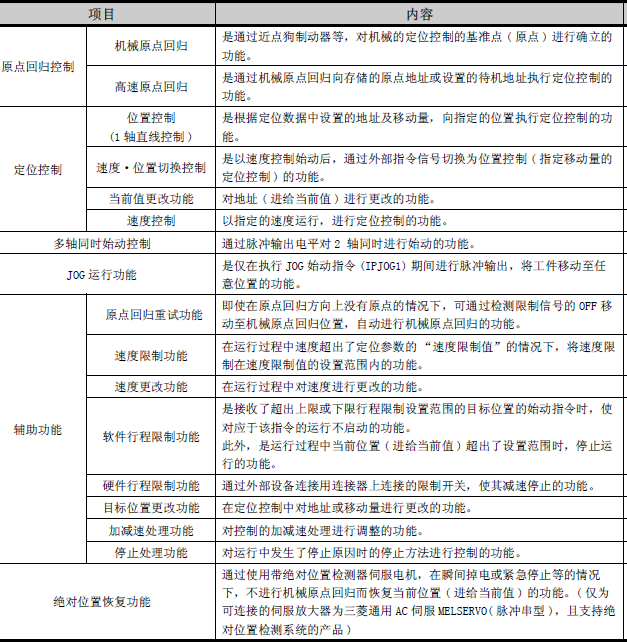
2、功能一覽
定位功能中可使用的功能的一覽如下所示
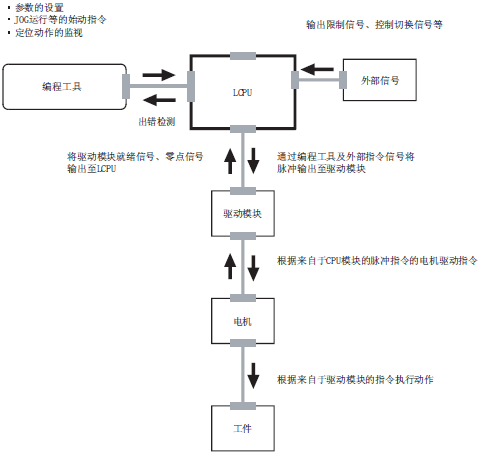
3、定位系統的結構
通過LCPU輸入脈沖執行定位控制。在定位系統中軟件及外部設備被用于下圖所示的用途。
4、驅動模塊內部的動作
對于從LCPU進行了脈沖輸入的驅動模塊,在其內部執行下述動作。
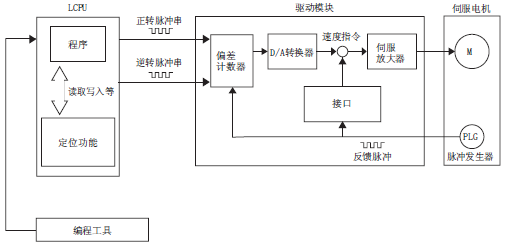
(1)、始動
通過LCPU 輸入了脈沖時,驅動模塊的偏差計數器中對輸入的脈沖進行累計。該脈沖的累計值(滯留脈沖)通過D/A轉換器變為直流模擬電壓,成為伺服電機(M)的速度指令。根據來自于驅動模塊的速度指令伺服電機開始旋轉。
(2)、運行過程中
伺服電機旋轉時,通過伺服電機附帶的脈沖發生器(PLG),發生與旋轉數成比例的反饋脈沖。發生的反饋脈沖將被反饋到驅動模塊中,與偏差計數器的滯留脈沖進行減法運算。偏差計數器保持一定的滯留量使伺服電機繼續旋轉。
(3)、停止
來自于LCPU 的指令脈沖輸出停止時,偏差計數器的滯留脈沖將減少速度將變慢。滯留脈沖變為0時伺服電機將停止。
伺服電機的旋轉速度與指令脈沖的頻率成比例,伺服電機的旋轉角度與指令脈沖的輸出脈沖數成比例。因此,如果對1個脈沖的移動量進行規定,可以進給至與脈沖串的脈沖數成比例的位置為止。此外,脈沖頻率將成為伺服電機的旋轉數(進給速度)。
專業銷售三菱觸摸屏、三菱變頻器、三菱伺服、三菱PLC,三菱L系列CPU大量現貨,品種齊全,L02CPU-CM、L02CPU-P-CM、L26CPU-BT-CM、L26CPU-PBT-CM價格好,歡迎選購!
定位是指,通過工作臺及機械將加工對象及工具等移動體(工件) 以指定的速度移動,正確地停止在目的位置處。
1、定位功能的作用
定位功能的控制是通過專用指令執行。
(1)、2軸控制
可以連接2個驅動模塊(2個電機),對2個坐標進行分別或同時控制。
(2)、原點回歸
有6種類型的原點回歸方式。使用近點狗(原點傳感器) 等,可以對原點(各控制的起點位置)及位置的“地
址”進行確立。(機械原點回歸)此外,可以在上限限制開關及下限限制開關的范圍內,自動進行原點回歸。
(原點回歸重試功能)
(3)、目的位置及速度
. 可以根據指定的地址或移動量,將工件移動至目標位置。(位置控制)
. 可以對工件進行移動直至執行停止指令為止。(速度控制)
. 可以將當前的位置更改為指定的數值。(當前值更改功能)
. 可以在工件的移動過程中對目標位置進行更改。(目標位置更改功能)
. 可以在工件的移動過程中對速度進行更改。(速度更改功能)
(4)、工件的移動范圍限制
可以在無需開關的狀況下將工件移動范圍的邏輯上限及下限設置在任意位置處。(軟件行程限制功能)
此外,也可設置使用了上限限制開關、下限限制開關的上限及下限范圍。(硬件行程限制功能)
(5)、JOG運行
可以在JOG 運行指令的執行過程中繼續進行脈沖輸出,將工件移動至任意的位置處。(JOG運行功能)
(6)、絕對位置檢測
使用帶絕對位置檢測器伺服電機,可以在停電后等情況下恢復當前位置。(絕對位置恢復功能)
2、功能一覽
定位功能中可使用的功能的一覽如下所示
3、定位系統的結構
通過LCPU輸入脈沖執行定位控制。在定位系統中軟件及外部設備被用于下圖所示的用途。
4、驅動模塊內部的動作
對于從LCPU進行了脈沖輸入的驅動模塊,在其內部執行下述動作。
(1)、始動
通過LCPU 輸入了脈沖時,驅動模塊的偏差計數器中對輸入的脈沖進行累計。該脈沖的累計值(滯留脈沖)通過D/A轉換器變為直流模擬電壓,成為伺服電機(M)的速度指令。根據來自于驅動模塊的速度指令伺服電機開始旋轉。
(2)、運行過程中
伺服電機旋轉時,通過伺服電機附帶的脈沖發生器(PLG),發生與旋轉數成比例的反饋脈沖。發生的反饋脈沖將被反饋到驅動模塊中,與偏差計數器的滯留脈沖進行減法運算。偏差計數器保持一定的滯留量使伺服電機繼續旋轉。
(3)、停止
來自于LCPU 的指令脈沖輸出停止時,偏差計數器的滯留脈沖將減少速度將變慢。滯留脈沖變為0時伺服電機將停止。
伺服電機的旋轉速度與指令脈沖的頻率成比例,伺服電機的旋轉角度與指令脈沖的輸出脈沖數成比例。因此,如果對1個脈沖的移動量進行規定,可以進給至與脈沖串的脈沖數成比例的位置為止。此外,脈沖頻率將成為伺服電機的旋轉數(進給速度)。
專業銷售三菱觸摸屏、三菱變頻器、三菱伺服、三菱PLC,三菱L系列CPU大量現貨,品種齊全,L02CPU-CM、L02CPU-P-CM、L26CPU-BT-CM、L26CPU-PBT-CM價格好,歡迎選購!
本頁關鍵詞:三菱CPU模塊定位功能,三菱L系列CPU模塊定位功能