



日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC iQ-R運動控制器系統的配置
日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC iQ-R運動控制器系統的配置
時間:2015-12-08 來源:未知 作者:admin 點擊:4229次
三菱iQ-R運動控制器系統的配置(iQ-R運動控制器系統配置)
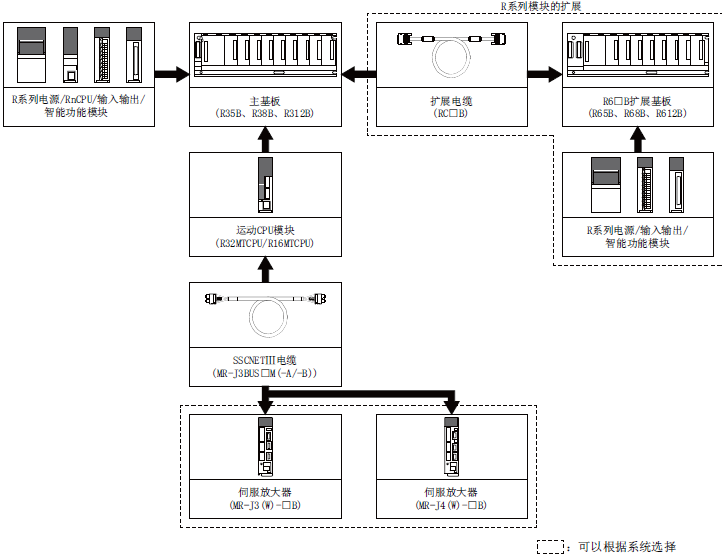
1、系統的設備配置
2、外圍設備的配置
以太網配置圖
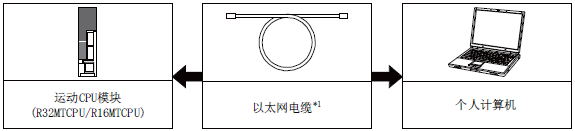
*1 對應的以太網電纜
┌─────┬────┬─────┬─────┬────────┐
│ 產品名 │連接方法│電纜 │以太網標準│艦格 │
├─────┼────┼─────┼─────┼────────┤
│以太網電纜│經由集 │直出型電纜│10BASE-T │以太網標準對應品│
│ │器連接 │ ├─────┤電纜類別5以上 │
│ │ │ │100BASE-TX│·屏蔽雙絞電纜 │
│ ├────┼─────┼─────┤ (STP電纜) │
│ │直接連接│直出型電纜│10BASE-T │ │
│ │ │交叉型電纜├─────┤ │
│ │ │ │100BASE-TX│ │
└─────┴────┴─────┴─────┴────────┘
■電纜選定條件
. 類別: 5以上
. 導體直徑: AWG26以上
. 屏蔽: 帶銅編織屏蔽及地線,或者銅編織屏蔽及鋁帶屏蔽
3、R32MTCPU/R16MTCPU系統總體配置
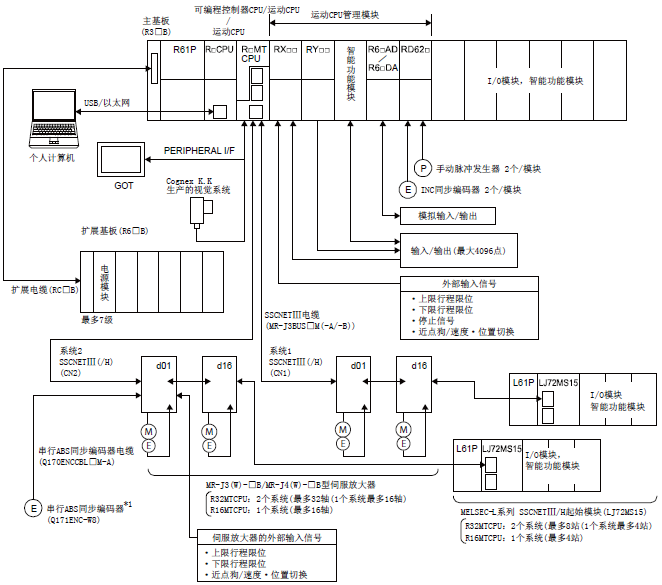
*1 僅MR-J4-口B-RJ
============---------==========注意=================================
A 控制器、伺服放大器異常時的動作可能威脅系統安全的情況下,應在控制器、伺服放大器的外部配置相應防范電路。
B 系統使用的部件(控制器、伺服放大器、伺服電機以外)的額定值、特性應適合于控制器、伺服放大器、伺服電機。
C 參數值應設置為適合于控制器、伺服放大器、伺服電機、再生電阻的型號、系統的用途。如果設置錯誤有可能導致保護功能不動作。
====================================================================
4、運動CPU模塊功能說明
1)、在運動CPU模塊中,可以進行以下伺服放大器控制。
┌─────┬────────────┐
│運動CPU │伺服放大器控制 │
├─────┼────────────┤
│R32MTCPU │2系統32軸(1系統最多16軸)│
├─────┼────────────┤
│R16MTCPU │1系統16軸 │
└─────┴────────────┘
2)、可以設置與運動運算周期同步,以恒定周期(最小0.222ms)執行的程序。
3)、通過在運動CPU模塊與伺服放大器之間使用SSCNET電纜連接,可以進行至伺服放大器的伺服參數的下載、至伺服放大器的伺服ON/OFF、位置指令等。
4)、可以將輸入輸出模塊、智能功能模塊(部分模塊除外)通過運動CPU模塊進行管理。(21頁 可通過運動CPU管理的可編程控
制器模塊)
5)、在多CPU系統中,可以通過CPU緩沖存儲器進行CPU之間的數據交換。
6)、通過將外部信號(上/下限行程限位、近點狗)經由伺服放大器輸入,可以減少配線工時。
7)、運動CPU模塊中不需要電池。
5、運動系統的限制事項
1)、多CPU系統組合
. 運動CPU模塊不能單獨使用。1號機需為MELSEC iQ-R系列的可編程控制器CPU模塊。
. 對于MELSEC iQ-R系列的可編程控制器CPU模塊/運動CPU模塊,從主基板的CPU插槽(電源模塊右鄰的插槽)開始至I/O插槽6為止之間最多可安裝4個。CPU模塊按從左開始的順序依次稱為1號機~4號機。2~4號機的CPU模塊的安裝順序無限制。1號機以
外的CPU中,可以進行CPU保留設置(即使未安裝CPU模塊也分配機號)。
. 運動CPU的啟動(變為可控制狀態為止)需要10秒左右。此后,需要各CPU的初始化時間。不等待其它機號的啟動而開始執行程序的系統的情況下,應更改多CPU之間同步啟動設置。
2)、運動CPU模塊的限制事項
. 運動CPU模塊只能管理MELSEC iQ-R系列模塊。不能管理MELSEC Q系列模塊。
. 緊急停止輸入中,應使用緊急停止輸入設置([運動CPU通用參數][基本設置])中指定的軟元件。
. 關于運動CPU模塊的DIN導軌安裝,請參閱以下手冊。
. 使用顯示器(GOT)的情況下,應使用支持運動CPU(R32MTCPU/R16MTCPU)的版本。
3)、SSCNET通信的限制事項
. 與伺服放大器通信時,需要在SSCNET設置([運動CPU通用參數][伺服網絡設置])中將各系統設置為“SSCNET/H”或“SSCNET”。設置了“SSCNET/H”的情況下可以使用MR-J4(W)-口B,設置了“SSCNET”的情況下可以使用MR-J3(W)-口B。
• 根據使用的通信方式及運算周期設置而不同。
1、系統的設備配置
2、外圍設備的配置
以太網配置圖
*1 對應的以太網電纜
┌─────┬────┬─────┬─────┬────────┐
│ 產品名 │連接方法│電纜 │以太網標準│艦格 │
├─────┼────┼─────┼─────┼────────┤
│以太網電纜│經由集 │直出型電纜│10BASE-T │以太網標準對應品│
│ │器連接 │ ├─────┤電纜類別5以上 │
│ │ │ │100BASE-TX│·屏蔽雙絞電纜 │
│ ├────┼─────┼─────┤ (STP電纜) │
│ │直接連接│直出型電纜│10BASE-T │ │
│ │ │交叉型電纜├─────┤ │
│ │ │ │100BASE-TX│ │
└─────┴────┴─────┴─────┴────────┘
■電纜選定條件
. 類別: 5以上
. 導體直徑: AWG26以上
. 屏蔽: 帶銅編織屏蔽及地線,或者銅編織屏蔽及鋁帶屏蔽
3、R32MTCPU/R16MTCPU系統總體配置
*1 僅MR-J4-口B-RJ
============---------==========注意=================================
A 控制器、伺服放大器異常時的動作可能威脅系統安全的情況下,應在控制器、伺服放大器的外部配置相應防范電路。
B 系統使用的部件(控制器、伺服放大器、伺服電機以外)的額定值、特性應適合于控制器、伺服放大器、伺服電機。
C 參數值應設置為適合于控制器、伺服放大器、伺服電機、再生電阻的型號、系統的用途。如果設置錯誤有可能導致保護功能不動作。
====================================================================
4、運動CPU模塊功能說明
1)、在運動CPU模塊中,可以進行以下伺服放大器控制。
┌─────┬────────────┐
│運動CPU │伺服放大器控制 │
├─────┼────────────┤
│R32MTCPU │2系統32軸(1系統最多16軸)│
├─────┼────────────┤
│R16MTCPU │1系統16軸 │
└─────┴────────────┘
2)、可以設置與運動運算周期同步,以恒定周期(最小0.222ms)執行的程序。
3)、通過在運動CPU模塊與伺服放大器之間使用SSCNET電纜連接,可以進行至伺服放大器的伺服參數的下載、至伺服放大器的伺服ON/OFF、位置指令等。
4)、可以將輸入輸出模塊、智能功能模塊(部分模塊除外)通過運動CPU模塊進行管理。(21頁 可通過運動CPU管理的可編程控
制器模塊)
5)、在多CPU系統中,可以通過CPU緩沖存儲器進行CPU之間的數據交換。
6)、通過將外部信號(上/下限行程限位、近點狗)經由伺服放大器輸入,可以減少配線工時。
7)、運動CPU模塊中不需要電池。
5、運動系統的限制事項
1)、多CPU系統組合
. 運動CPU模塊不能單獨使用。1號機需為MELSEC iQ-R系列的可編程控制器CPU模塊。
. 對于MELSEC iQ-R系列的可編程控制器CPU模塊/運動CPU模塊,從主基板的CPU插槽(電源模塊右鄰的插槽)開始至I/O插槽6為止之間最多可安裝4個。CPU模塊按從左開始的順序依次稱為1號機~4號機。2~4號機的CPU模塊的安裝順序無限制。1號機以
外的CPU中,可以進行CPU保留設置(即使未安裝CPU模塊也分配機號)。
. 運動CPU的啟動(變為可控制狀態為止)需要10秒左右。此后,需要各CPU的初始化時間。不等待其它機號的啟動而開始執行程序的系統的情況下,應更改多CPU之間同步啟動設置。
2)、運動CPU模塊的限制事項
. 運動CPU模塊只能管理MELSEC iQ-R系列模塊。不能管理MELSEC Q系列模塊。
. 緊急停止輸入中,應使用緊急停止輸入設置([運動CPU通用參數][基本設置])中指定的軟元件。
. 關于運動CPU模塊的DIN導軌安裝,請參閱以下手冊。
. 使用顯示器(GOT)的情況下,應使用支持運動CPU(R32MTCPU/R16MTCPU)的版本。
3)、SSCNET通信的限制事項
. 與伺服放大器通信時,需要在SSCNET設置([運動CPU通用參數][伺服網絡設置])中將各系統設置為“SSCNET/H”或“SSCNET”。設置了“SSCNET/H”的情況下可以使用MR-J4(W)-口B,設置了“SSCNET”的情況下可以使用MR-J3(W)-口B。
• 根據使用的通信方式及運算周期設置而不同。
本頁關鍵詞:iQ-R運動控制器