



日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC FX5U定位時的故障及排除方法
日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC FX5U定位時的故障及排除方法
時間:2015-11-02 來源:未知 作者:admin 點擊:27719次
三菱PLC FX5U定位時的故障及排除方法(FX5U定位故障)
一、脈沖輸出/旋轉方向輸出的LED狀態
可以通過CPU模塊中所設置的輸出軟元件(Y)的LED的亮燈狀況,確認是否進行定位動作。
┌─────┬──┬──┬──┬──┬───────┬────────────────┐
│ 信號名稱 │軸1 │軸2 │軸3 │軸4 │定位指令執行中│內容 │
│ │ │ │ │ │的LED的狀態 │ │
├─┬───┼──┼──┼──┼──┼───────┼────────────────┤
│脈│PULSE │Y0 │Y1 │Y2 │Y3 │閃爍 │通過定位指令正在控制脈沖輸出。 │
│沖│(脈沖 │ │ │ │ │(高速地ON/OFF)│ │
│輸│串) │ │ │ │ ├───────┼────────────────┤
│出│ │ │ │ │ │OFF │考慮可能是以下狀態。 │
│端│ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
│ ├───┼──┼──┼──┼──┼───────┼────────────────┤
│ │CF │Y0 │Y2 │ - │ - │閃爍 │通過定位指令正在進行正轉動作。 │
│ │(正轉 │ │ │ │ │(高速地ON/OFF)│此時。反轉脈沖串置為OFF. │
│ │脈沖 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考慮可能是以下狀態. │
│ │ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
├─┼───┼──┴──┴──┴──┼───────┼────────────────┤
│旋│SIGN │Y0~Y17 │ON │正在正轉動作。 │
│轉│(方向)│ ├───────┼────────────────┤
│方│ │ │OFF │考慮可能是以下狀態。 │
│向│ │ │ │1)正在采用定位指令進行反轉動作。│
│輸│ │ │ │2)因定位指令出錯,指令不動作。 │
│出├───┼──┬──┬──┬──┼───────┼────────────────┤
│ │CCW │Y1 │Y3 │ - │- │閃爍 │通過定位指令正在進行反轉動作。 │
│ │(反轉 │ │ │ │ │(高速地ON/OFF)│此時,正轉脈沖串置為OFF。 │
│ │脈沖 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考慮可能是以下狀態. │
│ │ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
└─┴───┴──┴──┴──┴──┴───────┴────────────────┘
二、出錯的確認
1、通用出錯
發生了與定位以外的功能通用的出錯(運算出錯、參數出錯)時,下述的出錯標志位將置為ON。
┌───────┬─────────┬──────┐
│最新自診斷出錯│最新自診斷出錯 │運算出錯 │
│(包含報普器ON)│(不包含報警器ON) │ │
├───────┼─────────┼──┬───┤
│SM0 │SM1 │SM56│SM8067│
└───────┴─────────┴──┴───┘
上述出錯標志位置為ON后,出錯代碼將存儲在下述軟元件中。此外,通用出錯將存儲全部軸的出錯代碼。
┌─────────┬──────────┐
│最新自診斷出錯代碼│最新自診斷出錯 │
│(包含報普器ON) │(不包含報警器ON) │
├─────────┼──────────┤
│SD0 │SMD8067 │
└─────────┴──────────┘
三、伺服電機、步進電機
伺服電機、步進電機不轉時,請確認以下項目。
1) 請確認接線。
2) 請執行定位指令,確認以下的LED的狀態。
• 設定為脈沖輸出端軟元件的輸出信號的LED
• 設定為旋轉方向輸出的輸出信號的LED
3) 請確認可編程控制器側和伺服放大器(驅動單元)的脈沖輸出形式是否相符。
4) 請確認停止脈沖輸出的標志位是否動作。
5) 請確認定位指令的動作時機。
四、停止位置
停止位置不正確時,請確認以下項目。
1) 請確認伺服放大器(驅動單元)的電子齒輪的設定是否正確。
2) 請確認原點位置是否偏移。
a) 設計近點DOG信號時,請考慮有足夠為ON的時間能充分減速到爬行速度。DSZR/DDSZR指令為,
在近點DOG的前端開始減速到爬行速度,在“近點DOG的后端”或者“從近點DOG的后端開始
檢測出第一個零點信號”時停止,清除當前地址。
b) 請使爬行速度足夠的慢。DSZR/DDSZR指令的停止是不進行減速停止的,所以如果爬行速度過快,
會由于慣性導致停止位置偏移。
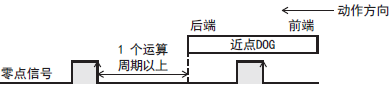
c) 近點DOG信號的檢測(前端、后端)受到應答時間及順控程序的運算周期的影響。請將從DOG后端到
零點信號置為ON空出1個運算周期以上。
d) 使用DSZR/DDSZR指令時,因為使用伺服電機的零點信號,所以請按照以下關系調整DOG的后端和
零點信號。或者在需要對原點位置做微調時,請調整近點DOG信號的位置。
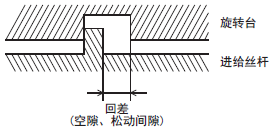
3) 進行正反轉動作(往返動作)后,停止位置有偏離時
定位功能不能修正機械單位制的回差(空隙、松動間隙)。如果需要修正,或在移動方向反轉動作時,
請預先考慮回差部分,從而設定輸出脈沖數。
一、脈沖輸出/旋轉方向輸出的LED狀態
可以通過CPU模塊中所設置的輸出軟元件(Y)的LED的亮燈狀況,確認是否進行定位動作。
┌─────┬──┬──┬──┬──┬───────┬────────────────┐
│ 信號名稱 │軸1 │軸2 │軸3 │軸4 │定位指令執行中│內容 │
│ │ │ │ │ │的LED的狀態 │ │
├─┬───┼──┼──┼──┼──┼───────┼────────────────┤
│脈│PULSE │Y0 │Y1 │Y2 │Y3 │閃爍 │通過定位指令正在控制脈沖輸出。 │
│沖│(脈沖 │ │ │ │ │(高速地ON/OFF)│ │
│輸│串) │ │ │ │ ├───────┼────────────────┤
│出│ │ │ │ │ │OFF │考慮可能是以下狀態。 │
│端│ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
│ ├───┼──┼──┼──┼──┼───────┼────────────────┤
│ │CF │Y0 │Y2 │ - │ - │閃爍 │通過定位指令正在進行正轉動作。 │
│ │(正轉 │ │ │ │ │(高速地ON/OFF)│此時。反轉脈沖串置為OFF. │
│ │脈沖 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考慮可能是以下狀態. │
│ │ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
├─┼───┼──┴──┴──┴──┼───────┼────────────────┤
│旋│SIGN │Y0~Y17 │ON │正在正轉動作。 │
│轉│(方向)│ ├───────┼────────────────┤
│方│ │ │OFF │考慮可能是以下狀態。 │
│向│ │ │ │1)正在采用定位指令進行反轉動作。│
│輸│ │ │ │2)因定位指令出錯,指令不動作。 │
│出├───┼──┬──┬──┬──┼───────┼────────────────┤
│ │CCW │Y1 │Y3 │ - │- │閃爍 │通過定位指令正在進行反轉動作。 │
│ │(反轉 │ │ │ │ │(高速地ON/OFF)│此時,正轉脈沖串置為OFF。 │
│ │脈沖 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考慮可能是以下狀態. │
│ │ │ │ │ │ │ │1)定位指令的動作結束了。 │
│ │ │ │ │ │ │ │2)因定位指令出錯,指令不動作。 │
└─┴───┴──┴──┴──┴──┴───────┴────────────────┘
二、出錯的確認
1、通用出錯
發生了與定位以外的功能通用的出錯(運算出錯、參數出錯)時,下述的出錯標志位將置為ON。
┌───────┬─────────┬──────┐
│最新自診斷出錯│最新自診斷出錯 │運算出錯 │
│(包含報普器ON)│(不包含報警器ON) │ │
├───────┼─────────┼──┬───┤
│SM0 │SM1 │SM56│SM8067│
└───────┴─────────┴──┴───┘
上述出錯標志位置為ON后,出錯代碼將存儲在下述軟元件中。此外,通用出錯將存儲全部軸的出錯代碼。
┌─────────┬──────────┐
│最新自診斷出錯代碼│最新自診斷出錯 │
│(包含報普器ON) │(不包含報警器ON) │
├─────────┼──────────┤
│SD0 │SMD8067 │
└─────────┴──────────┘
三、伺服電機、步進電機
伺服電機、步進電機不轉時,請確認以下項目。
1) 請確認接線。
2) 請執行定位指令,確認以下的LED的狀態。
• 設定為脈沖輸出端軟元件的輸出信號的LED
• 設定為旋轉方向輸出的輸出信號的LED
3) 請確認可編程控制器側和伺服放大器(驅動單元)的脈沖輸出形式是否相符。
4) 請確認停止脈沖輸出的標志位是否動作。
5) 請確認定位指令的動作時機。
四、停止位置
停止位置不正確時,請確認以下項目。
1) 請確認伺服放大器(驅動單元)的電子齒輪的設定是否正確。
2) 請確認原點位置是否偏移。
a) 設計近點DOG信號時,請考慮有足夠為ON的時間能充分減速到爬行速度。DSZR/DDSZR指令為,
在近點DOG的前端開始減速到爬行速度,在“近點DOG的后端”或者“從近點DOG的后端開始
檢測出第一個零點信號”時停止,清除當前地址。
b) 請使爬行速度足夠的慢。DSZR/DDSZR指令的停止是不進行減速停止的,所以如果爬行速度過快,
會由于慣性導致停止位置偏移。
c) 近點DOG信號的檢測(前端、后端)受到應答時間及順控程序的運算周期的影響。請將從DOG后端到
零點信號置為ON空出1個運算周期以上。
d) 使用DSZR/DDSZR指令時,因為使用伺服電機的零點信號,所以請按照以下關系調整DOG的后端和
零點信號。或者在需要對原點位置做微調時,請調整近點DOG信號的位置。
3) 進行正反轉動作(往返動作)后,停止位置有偏離時
定位功能不能修正機械單位制的回差(空隙、松動間隙)。如果需要修正,或在移動方向反轉動作時,
請預先考慮回差部分,從而設定輸出脈沖數。
本頁關鍵詞:FX5U定位故障