



日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC FX5U系列多個旋轉臺的執行方法
日韩精品成人内射视频丨国产精品内射老熟女丨日韩欧美群交P片內射中文丨亚洲国产群交无码AV丨欧美日韩国产精品丨老司机午夜亚洲福利丨久久精品午夜福利丨经典午夜福利片 三菱PLC FX5U系列多個旋轉臺的執行方法
時間:2015-10-24 來源:未知 作者:admin 點擊:6136次
三菱PLC FX5U多個旋轉臺的執行方法
作為DRVTBL、DRVMUL指令的多個旋轉臺的執行方法,有步進運行和連續運行兩種,以下就各自的執行方法做說明。
一、步進運行
步進運行按照使用DRVTBL指令指定的旋轉臺的順序依次執行。
雖然每次旋轉臺結束時結束標志位置為ON,但不自動執行下一個旋轉臺。如果檢測出旋轉臺切換指令或外部開始信號,將執行下一個旋轉臺。
下圖為旋轉臺1~3中使用停留時間的步進運行時的動作示例。
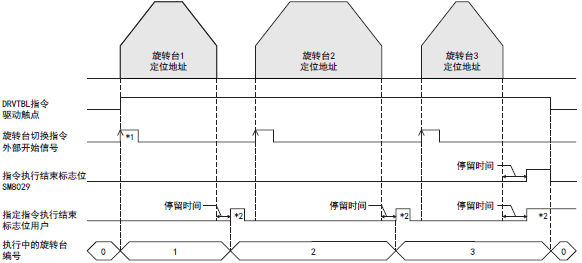
*1 外部開始信號有效時,啟動定位指令需要將驅動觸點和外部開始信號置為ON。
*2 在用戶置為OFF或切換至下一個旋轉臺前不置為OFF。
動作:就步進運行時的旋轉臺、標志位的動作做說明。
1、旋轉臺的動作
• 步進運行時的各個旋轉臺動作與僅執行1個旋轉臺時相同。
• 執行控制方式[0:無定位]的旋轉臺、DRVTBL指令中指定的最終旋轉臺時,以全部旋轉臺結束作為條件。
但是,起始旋轉臺>最終旋轉臺時,通過執行最多旋轉臺數或控制方式[0:無定位]結束。
• 在旋轉臺結束之前,即使將旋轉臺切換指令或外部開始信號置為ON,也不切換至下一個編號的旋轉臺。
上一個旋轉臺結束后,通過旋轉臺切換指令或外部開始信號,開始執行下一個旋轉臺。
• 正在執行的旋轉臺異常結束時,之后的旋轉臺將不動作。
• 無論正常結束或是異常結束,按每個指令驅動從起始旋轉臺開始。不從上一次結束的旋轉臺繼續動作。
• 有支持剩余距離運行的控制方式。
2、通過控制方式進行動作
• 如果執行控制方式[0:無定位]的旋轉臺時,將視為全部的旋轉臺已正常結束,結束標志位置為ON。之后的旋轉臺將不動作。
• 控制方式[10:附帶條件跳轉]在執行旋轉臺時進行條件判定,并立即執行下一個編號的旋轉臺。
• 控制方式[4:可變速度運行]、[5:附帶表格轉移的可變速度運行]時,檢測出脈沖減速指令并減速停止后,在停留時間后結束標志位置為ON,并可以執行下一個旋轉臺。控制方式[5:附帶表格轉移的可變速度運行]時,通過脈沖減速停止指令進行減速停止,并通過檢測出中斷輸入信號2進行減速停止,將可以執行下一個旋轉臺。
3、標志位的動作
用戶指定的定位結束標志位在每個旋轉臺都置為ON。ON后的結束標志位,在用戶置為OFF或下一個旋
轉臺開始時將置為OFF。指令執行異常結束標志位(SM8029)在全部旋轉臺結束時置為ON。
4、通過旋轉臺(操作數)設定進行動作
• 與執行單一的旋轉臺相同,在動作中可以變更操作數。
• 也可混用絕對地址、相對地址。
支持的控制方式:各旋轉臺的控制方式指定步進運行時的動作如下所示。
┌────────────────┬───────────────┐
│ 控制方式 │動作 │
├────────────────┼───────────────┤
│0:無定位 │指定時,不輸出脈沖。正常結束 │
├────────────────┼───────────────┤
│1:1速定位(相對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│2:1速定位(絕時地址指定) │正常動作。 │
├────────────────┼───────────────┤
│3:中斷1速定位 │正常動作。 │
├────────────────┼───────────────┤
│4:可變速度運行 │正常動作。 │
├────────────────┼───────────────┤
│5:附帶表格轉移的可變速度運行 │正常動作。 │
├────────────────┼───────────────┤
│6:中斷停止(相對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│7:中斷停止(絕對地址拍定) │正常動作。 │
├────────────────┼───────────────┤
│10:附帶條件跳轉 │按暇跳轉目標旋轉臺。 │
├────────────────┼───────────────┤
│20:插補運行(相對地址指定) │正常動作. │
├────────────────┼───────────────┤
│21:插補運行(相對地址指定對象軸) │指定時,不輸出脈沖。異常結束。│
├────────────────┼───────────────┤
│22:插補運行(絕對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│23:插補運行(絕對地址指定對象軸) │指定時,不輸出脈沖。異常結束。│
└────────────────┴───────────────┘
二、連續運行
連續運行在旋轉臺和旋轉臺之間不減速停止,進行連續的動作。指定的定位地址的輸出結束的位置,將成為下一個旋轉臺的開始地址。
定位結束標志位在指定的旋轉臺全部執行結束后置為ON。與步進運行不同,不需要旋轉臺切換指令。
下圖為連續運行旋轉臺1~5(有停留時間)時的動作示例。
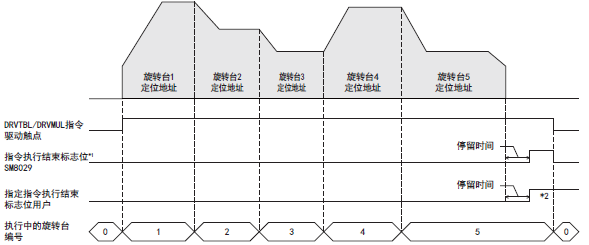
*1 僅DRVTBL指令進行動作。
*2 在用戶置為OFF前不置為OFF。
動作:就步進運行時的旋轉臺、標志位的動作做說明。
1、旋轉臺的動作
• 從減速停止開始到結束標志位置為ON為止的時間,成為最終旋轉臺的停留時間。
• 連續運行方向變化的旋轉臺時,先暫時減速停止,再向反轉方向輸出。從脈沖輸出停止
開始到向反方向輸出為止的時間為1ms+掃描時間。
• 正在執行的旋轉臺異常結束時,之后的旋轉臺將不動作。
• 如果執行了不能組合的旋轉臺,將異常結束。此時,將不能組合的之前的旋轉臺作為最終旋轉臺進行動作。之前的旋轉臺進行減速停止,經過停留時間后,異常結束標志位置為ON。
此外,停留時間也變為之前旋轉臺設定的時間。
• 有支持剩余距離運行的控制方式。
2、通過控制方式進行動作
• 如果執行控制方式[0:無定位]的表時,將視為全部的旋轉臺已正常結束,定位結束標志位置為ON,之后的旋轉臺不動作。
• 在前方2個旋轉臺時決定控制方式[10:附帶條件跳轉]的跳轉條件。(例:旋轉臺8為控制方式[10:附帶條件跳轉]的旋轉臺時,在旋轉臺6開始時進行條件判定。)控制方式[10:附帶條件跳轉]的跳轉目標還進行控制方式[10:附帶條件跳轉]時,將同時判定跳轉目標的控制方式[10:附帶條件跳轉]的條件。
3、通過旋轉臺(操作數)設定進行動作
• 為了讓旋轉臺切換的次數在10ms/1次以下,請設定各旋轉臺的指令速度、定位地址(附帶條件跳轉除外)。 旋轉臺切換的頻率高于上述次數時,將來不及進行旋轉臺的切換處理,減速停止后異常結束(動作到能夠正常讀取的旋轉臺為止)。
• 連續運行時,僅可對最終旋轉臺進行定位地址的變更。即使改寫最終旋轉臺以外的定位地址,也將被忽略。
• 關于最終旋轉臺的定位地址的改寫,地址的增加方向、減少方向均可變更。變更為減少方向、超過已
變更后的地址時和向減速停止所需要的脈沖不足的地址變更時,減速停止后向反轉方向輸出脈沖,到達變更后的定位地址(與DRVI/DDRVI、DRVA/DDRVA指令時的動作相同)。
支持的控制方式:連續運行時可組合的控制方式如下所示。
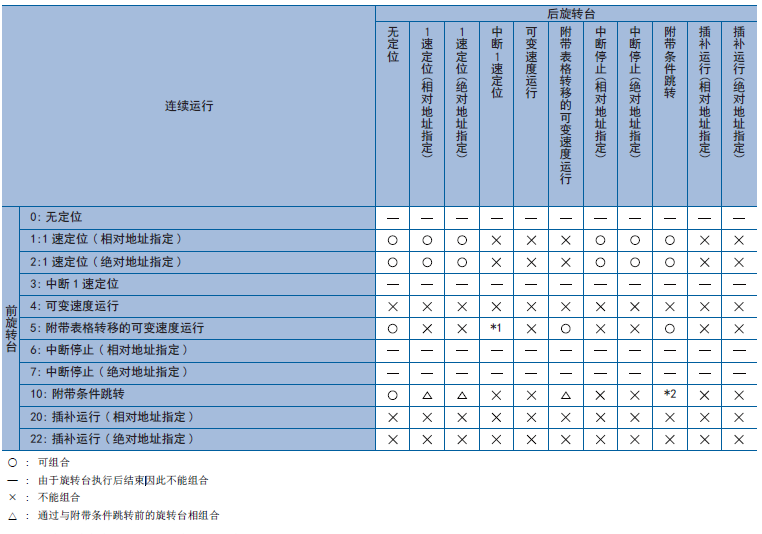
*1 第2個旋轉臺為控制方式[3:中斷1速定位]時可組合
*2 可組合至連續運行3次為止
旋轉臺的不執行:
在連續運行中,設定定位地址為無需定位的旋轉臺,將不執行直接切換至下一個旋轉臺。
不執行的條件如下所示。
┌────────────┬─────────────────────┐
│ 控制方式 │旋轉臺不執行條件 │
├────────────┼─────────────────────┤
│1:1速定位(相對地址指定) │定位地址=0 │
├────────────┼─────────────────────┤
│2:1速定位(絕對地址指定) │定位地址=相應旋轉臺執行開始時的當前地址*1 │
├────────────┼─────────────────────┤
│6:中斷停止(相對地址指定)│定位地址= 0 │
├────────────┼─────────────────────┤
│7:中斷停止(絕對地址指定)│定位地址=相應旋轉臺執行開始時的當前地址*1 │
└────────────┴─────────────────────┘
*1 進行了如下所示指定時,將不執行。
旋轉臺No.1:控制方式[1:1速定位(相對地址指定)]的定位地址為2000
旋轉臺No.2:控制方式[2:1速定位(絕對地址指定)]的定位地址為2000
作為DRVTBL、DRVMUL指令的多個旋轉臺的執行方法,有步進運行和連續運行兩種,以下就各自的執行方法做說明。
一、步進運行
步進運行按照使用DRVTBL指令指定的旋轉臺的順序依次執行。
雖然每次旋轉臺結束時結束標志位置為ON,但不自動執行下一個旋轉臺。如果檢測出旋轉臺切換指令或外部開始信號,將執行下一個旋轉臺。
下圖為旋轉臺1~3中使用停留時間的步進運行時的動作示例。
*1 外部開始信號有效時,啟動定位指令需要將驅動觸點和外部開始信號置為ON。
*2 在用戶置為OFF或切換至下一個旋轉臺前不置為OFF。
動作:就步進運行時的旋轉臺、標志位的動作做說明。
1、旋轉臺的動作
• 步進運行時的各個旋轉臺動作與僅執行1個旋轉臺時相同。
• 執行控制方式[0:無定位]的旋轉臺、DRVTBL指令中指定的最終旋轉臺時,以全部旋轉臺結束作為條件。
但是,起始旋轉臺>最終旋轉臺時,通過執行最多旋轉臺數或控制方式[0:無定位]結束。
• 在旋轉臺結束之前,即使將旋轉臺切換指令或外部開始信號置為ON,也不切換至下一個編號的旋轉臺。
上一個旋轉臺結束后,通過旋轉臺切換指令或外部開始信號,開始執行下一個旋轉臺。
• 正在執行的旋轉臺異常結束時,之后的旋轉臺將不動作。
• 無論正常結束或是異常結束,按每個指令驅動從起始旋轉臺開始。不從上一次結束的旋轉臺繼續動作。
• 有支持剩余距離運行的控制方式。
2、通過控制方式進行動作
• 如果執行控制方式[0:無定位]的旋轉臺時,將視為全部的旋轉臺已正常結束,結束標志位置為ON。之后的旋轉臺將不動作。
• 控制方式[10:附帶條件跳轉]在執行旋轉臺時進行條件判定,并立即執行下一個編號的旋轉臺。
• 控制方式[4:可變速度運行]、[5:附帶表格轉移的可變速度運行]時,檢測出脈沖減速指令并減速停止后,在停留時間后結束標志位置為ON,并可以執行下一個旋轉臺。控制方式[5:附帶表格轉移的可變速度運行]時,通過脈沖減速停止指令進行減速停止,并通過檢測出中斷輸入信號2進行減速停止,將可以執行下一個旋轉臺。
3、標志位的動作
用戶指定的定位結束標志位在每個旋轉臺都置為ON。ON后的結束標志位,在用戶置為OFF或下一個旋
轉臺開始時將置為OFF。指令執行異常結束標志位(SM8029)在全部旋轉臺結束時置為ON。
4、通過旋轉臺(操作數)設定進行動作
• 與執行單一的旋轉臺相同,在動作中可以變更操作數。
• 也可混用絕對地址、相對地址。
支持的控制方式:各旋轉臺的控制方式指定步進運行時的動作如下所示。
┌────────────────┬───────────────┐
│ 控制方式 │動作 │
├────────────────┼───────────────┤
│0:無定位 │指定時,不輸出脈沖。正常結束 │
├────────────────┼───────────────┤
│1:1速定位(相對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│2:1速定位(絕時地址指定) │正常動作。 │
├────────────────┼───────────────┤
│3:中斷1速定位 │正常動作。 │
├────────────────┼───────────────┤
│4:可變速度運行 │正常動作。 │
├────────────────┼───────────────┤
│5:附帶表格轉移的可變速度運行 │正常動作。 │
├────────────────┼───────────────┤
│6:中斷停止(相對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│7:中斷停止(絕對地址拍定) │正常動作。 │
├────────────────┼───────────────┤
│10:附帶條件跳轉 │按暇跳轉目標旋轉臺。 │
├────────────────┼───────────────┤
│20:插補運行(相對地址指定) │正常動作. │
├────────────────┼───────────────┤
│21:插補運行(相對地址指定對象軸) │指定時,不輸出脈沖。異常結束。│
├────────────────┼───────────────┤
│22:插補運行(絕對地址指定) │正常動作。 │
├────────────────┼───────────────┤
│23:插補運行(絕對地址指定對象軸) │指定時,不輸出脈沖。異常結束。│
└────────────────┴───────────────┘
二、連續運行
連續運行在旋轉臺和旋轉臺之間不減速停止,進行連續的動作。指定的定位地址的輸出結束的位置,將成為下一個旋轉臺的開始地址。
定位結束標志位在指定的旋轉臺全部執行結束后置為ON。與步進運行不同,不需要旋轉臺切換指令。
下圖為連續運行旋轉臺1~5(有停留時間)時的動作示例。
*1 僅DRVTBL指令進行動作。
*2 在用戶置為OFF前不置為OFF。
動作:就步進運行時的旋轉臺、標志位的動作做說明。
1、旋轉臺的動作
• 從減速停止開始到結束標志位置為ON為止的時間,成為最終旋轉臺的停留時間。
• 連續運行方向變化的旋轉臺時,先暫時減速停止,再向反轉方向輸出。從脈沖輸出停止
開始到向反方向輸出為止的時間為1ms+掃描時間。
• 正在執行的旋轉臺異常結束時,之后的旋轉臺將不動作。
• 如果執行了不能組合的旋轉臺,將異常結束。此時,將不能組合的之前的旋轉臺作為最終旋轉臺進行動作。之前的旋轉臺進行減速停止,經過停留時間后,異常結束標志位置為ON。
此外,停留時間也變為之前旋轉臺設定的時間。
• 有支持剩余距離運行的控制方式。
2、通過控制方式進行動作
• 如果執行控制方式[0:無定位]的表時,將視為全部的旋轉臺已正常結束,定位結束標志位置為ON,之后的旋轉臺不動作。
• 在前方2個旋轉臺時決定控制方式[10:附帶條件跳轉]的跳轉條件。(例:旋轉臺8為控制方式[10:附帶條件跳轉]的旋轉臺時,在旋轉臺6開始時進行條件判定。)控制方式[10:附帶條件跳轉]的跳轉目標還進行控制方式[10:附帶條件跳轉]時,將同時判定跳轉目標的控制方式[10:附帶條件跳轉]的條件。
3、通過旋轉臺(操作數)設定進行動作
• 為了讓旋轉臺切換的次數在10ms/1次以下,請設定各旋轉臺的指令速度、定位地址(附帶條件跳轉除外)。 旋轉臺切換的頻率高于上述次數時,將來不及進行旋轉臺的切換處理,減速停止后異常結束(動作到能夠正常讀取的旋轉臺為止)。
• 連續運行時,僅可對最終旋轉臺進行定位地址的變更。即使改寫最終旋轉臺以外的定位地址,也將被忽略。
• 關于最終旋轉臺的定位地址的改寫,地址的增加方向、減少方向均可變更。變更為減少方向、超過已
變更后的地址時和向減速停止所需要的脈沖不足的地址變更時,減速停止后向反轉方向輸出脈沖,到達變更后的定位地址(與DRVI/DDRVI、DRVA/DDRVA指令時的動作相同)。
支持的控制方式:連續運行時可組合的控制方式如下所示。
*1 第2個旋轉臺為控制方式[3:中斷1速定位]時可組合
*2 可組合至連續運行3次為止
旋轉臺的不執行:
在連續運行中,設定定位地址為無需定位的旋轉臺,將不執行直接切換至下一個旋轉臺。
不執行的條件如下所示。
┌────────────┬─────────────────────┐
│ 控制方式 │旋轉臺不執行條件 │
├────────────┼─────────────────────┤
│1:1速定位(相對地址指定) │定位地址=0 │
├────────────┼─────────────────────┤
│2:1速定位(絕對地址指定) │定位地址=相應旋轉臺執行開始時的當前地址*1 │
├────────────┼─────────────────────┤
│6:中斷停止(相對地址指定)│定位地址= 0 │
├────────────┼─────────────────────┤
│7:中斷停止(絕對地址指定)│定位地址=相應旋轉臺執行開始時的當前地址*1 │
└────────────┴─────────────────────┘
*1 進行了如下所示指定時,將不執行。
旋轉臺No.1:控制方式[1:1速定位(相對地址指定)]的定位地址為2000
旋轉臺No.2:控制方式[2:1速定位(絕對地址指定)]的定位地址為2000
注意事項:旋轉臺的不執行連續4個旋轉臺以上時,異常結束。
以上資料由本公司提供,更多相關資料請登錄 http://sokorea.cn
本頁關鍵詞:FX5U多個旋轉